
Featured Alum-a-Lift
Compact Cylinder Handling Lift for Automated Filling Lines
Project
36814

Featuring
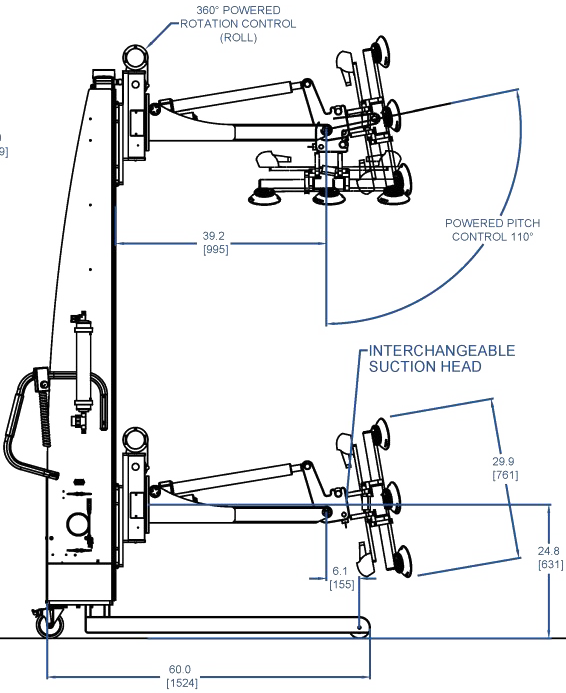
Powered Clamp, Rotating Wrists
Handling
Up to 60 LB [27 KG] Cylinders
Details
Removing full cylinders from an automated filling line becomes a cylinder handling problem when the line faults. At the customer’s site, each full cylinder weighs about 60 lbs. [27 kgs.], above their manual lifting limit. Project 36814 is a custom Alum‑a‑Lift concept for a cylinder handling application designed to safely extract a full cylinder from individual filling or QA stations without colliding with surrounding hardware or the filling system. The lift is intended for use in a clean, warehouse‑like environment with concrete floors, no washdown requirement, and no significant overhead obstacles.
The filling line consists of two rows of six stations with a robotic cylinder handling system between them, plus two QA stations with the same form factor. Access is constrained by a 29” safety enclosure opening and a 20” reach from outside the enclosure to the cylinder centerline, with the cylinder’s retaining ring located roughly 48” above the floor. To address the compound movements required for removal—reach into the enclosure, engage around the cylinder, lift clear, and withdraw—this lift is engineered around a carefully defined rotation point so the cylinder can be removed without contacting the filling hardware. Aluminum construction meets the environmental needs while keeping the lift light and maneuverable over short distances, typically within a 10 ft. operating margin.
Because the lift will be used only intermittently during automated line faults, it is designed to plug into a standard wall outlet when needed, avoiding the complexity of battery maintenance for such low duty cycles. A compact base sized to pass through 29” openings, combined with a controlled reach mechanism aligned to the cylinder centerline, helps operators position the lift precisely without risking damage to station components. Together, these characteristics create a dedicated cylinder removal tool that turns a high‑risk manual task into a controlled, repeatable lifting operation. The same design principles (tight‑tolerance reach, defined rotation points, and compact access through guarding) can be adapted for other automated lines where occasional manual intervention is required, but manual lifting exceeds site limits.
